UROPs in EAPS
World-renowned faculty. Real-world research.
The MIT Undergraduate Research Opportunities Program (UROP) offers undergraduates the chance to jump-start their scientific careers, collaborating directly with faculty on hands-on projects.
EAPS is a collegial department with an informal atmosphere—our faculty actively welcome UROP students to join their research teams. First-year students often ask if they are eligible to work on a UROP project—in the vast majority of cases the answer is, yes!
The most common way to find a UROP project is to just ask! Find out who is doing work that interests you and go knock on their door, or send an email—most faculty are willing to work with you to find a project in their lab.
Questions? Want help getting started to find a lab?
Sometimes open projects are listed below, but most students become involved by just reaching out! Feel free to email or visit the EAPS Education Office. No appointment is necessary. It is common for students to drop in.
Contact the EAPS Education Office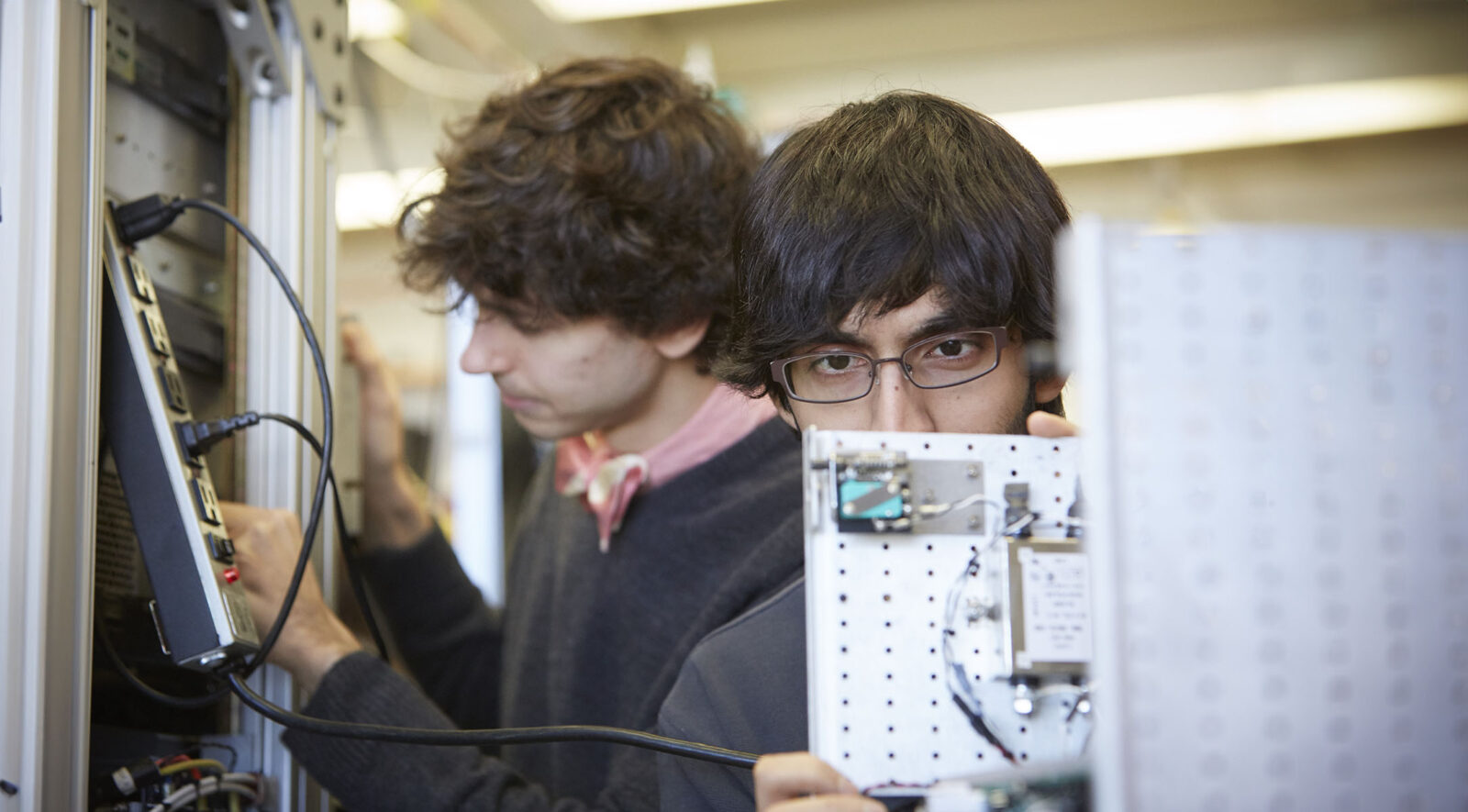
Selected UROPs
Note: the UROP website contains a more up-to-date list, but really… most students become involved by just reaching out!
Period: IAP, Spring, Summer, Fall
PI/Faculty Supervisor: Ryan Woosley
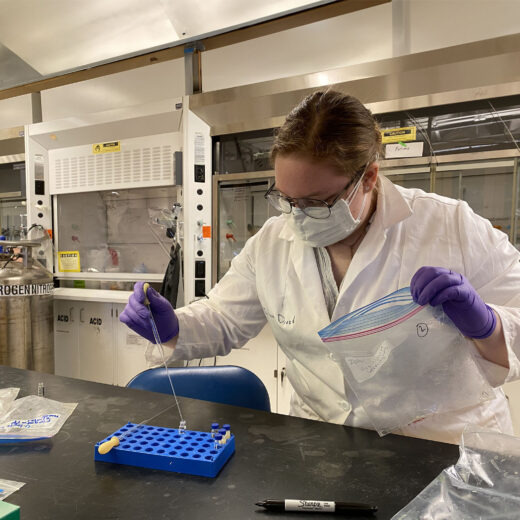
The Woosley Lab studies ocean acidification and uptake of anthropogenic carbon by the oceans. The lab offers many opportunities for UROPs covering a wide range of aspects. Including chemical analysis of inorganic carbon, total alkalinity, and pH, data analysis, and instrument development (engineering). Opportunities include both hands on laboratory work and remote work through data analysis.
Period: IAP, Spring, Fall
PI/Faculty Supervisor: Richard Teague
Primary Contact: Michael Person
The Wallace Remote Observation Lab is recruiting student observers to gather data for various research projects using the telescopes at Wallace Observatory. Observations will be made from our lab in 54-527, utilizing remote control of the telescopes in Westford, MA. Tasks will include, observational training, nighttime data gathering, data reduction and analysis, and remote observation manual creation and editing. All tasks will be performed by observing team members working in concert.
Period: IAP, Spring, Summer, Fall
PI/Faculty Supervisor: Richard Teague
In conjunction with the Planet Formation Lab in EAPS, members of the Submillimeter Array (SMA) at the Center for Astrophysics | Harvard & Smithsonian are seeking students to assist with and engage in hands-on scientific research, telescope operations, and instrument development (hardware and software). Successful applicants will work alongside leading scientists and engineers — including those in the SAO Radio Science Technology Laboratory — and contribute to groundbreaking research being conducted with SMA. In-person, hybrid, and remote options are available.


EAPS summer UROPs hit the 90s
July 13, 2020
Computing in Earth Science: a Non-linear Path
September 11, 2019